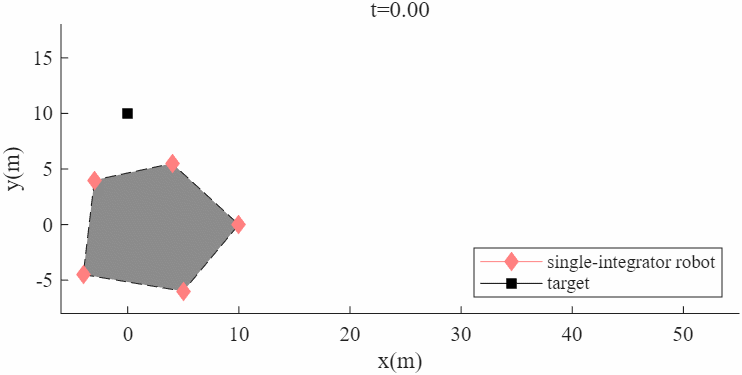
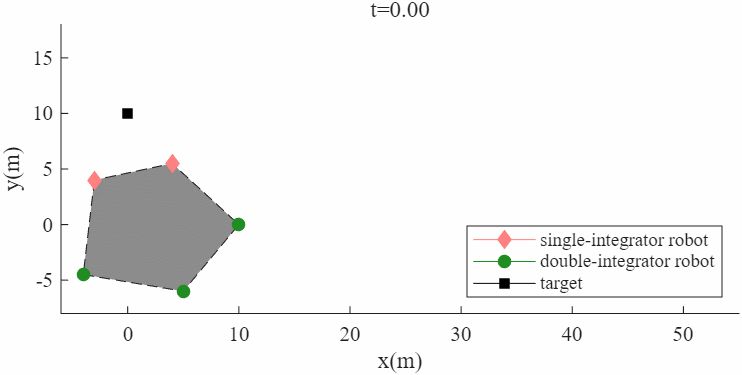
shortlink: https://sysusz422.github.io/f/2/The dynamic figures are presented below in gif and webp format.Fig. 3#gif webpFig. 9#gif webpFig. 13 Cooperative Fencing Control Experiment via Spherical Robots (Sphero BOLT)#
{kind=link}
{kind=link}